Dossier de validation de Tunren
Afin de valider notre outil, on s'appuie sur le logiciel Plaxis. Le bon paramétrage du modèle implémenté a été vérifié à l'aide d'un schéma de différences finies implémenté sous Python, lui-même validé avec les solutions analytiques présentées par Panet.
Modèle Plaxis
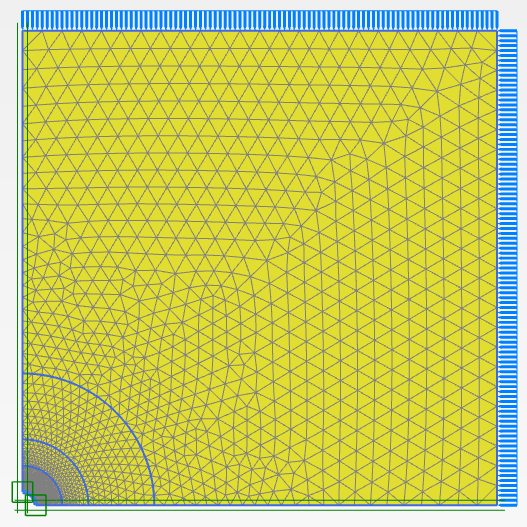
Afin d'éviter les problèmes de dissymétrie des conditions aux limites, on choisit de modéliser un quart de tunnel. Le rayon choisi est de 5m, et le modèle est de taille 180 m \(\times\) 180 m.
Le maillage est raffiné selon des quarts d'anneaux autour du puits avec des coarseness factors de respectivement 0.0325, 0.1, 0.25, 0.5 pour des rayons de 5, 15, 25 et 50 mètres.
Le maillage possède 4160 éléments, et on adopte le phasage suivant :
Phase_0: Initialisation du modèle. On utilise la procédure Field Stress pour obtenir un état de contraintes isotrope.Phase_1: Chargement. Activations des lineloads pour les bordures droite et haute du modèle. Les conditions aux limites en déformations sont alors prises pour toute la suite comme Free à droite et en haut, et comme Normally fixed à gauche et en bas.Phase_2: Excavation. Désactivation de l'élément de sol du premier quart de cercle, avec le taux de déconfinement de calcul. Activation de la plaque de soutènement avec le matériau No Lining.Phase_3: Équilibre final. Taux de déconfinement de 100%. Affectation du matériau Lining à la plaque de soutènement.
On rajoute au besoin des Phase_4 et Phase_5 dans le cas où l'on veut tester un second taux de déconfinement, pour comparer avec la version n°3 de Tunren par exemple (tableur pré-existant).
Dans Plaxis, le soutènement est assimilé à un soutènement mince équivalent (plaque). Sa raideur est gouvernée par trois grandeurs :
- La rigidité axiale \(EA\) [kN/m], qui correspond en fait au module d'Young \(E\) multiplié par l'épaisseur équivalente \(e\).
- La rigidité en flexion \(EI\) [kN.m²/m], qui se calcule via :
- Le coefficient de Poisson \(\nu\).
Pour faire le lien avec la méthode convergence-confinement, on doit exprimer ceux-ci en fonction des deux paramètres \(K_\text{sn}\) et \(K_\text{sf}\).
Afin d'éliminer un paramètre et de simplifier les expressions, on prend \(\nu=0\). D'après Panet, la rigidité normale d'un soutènement mince s'écrit :
On déduit donc la rigidité axiale de la rigidité normale en multipliant par le rayon du tunnel.
La rigidité en flexion a une influence négligeable dans le cas de tunnels circulaires isotropes. Elle s'écrit d'après Panet :
On évalue alors \(K_\text{sf}\) en divisant par 1200 (hypothèse de Panet d'une épaisseur équivalente dix fois inférieure au rayon), et on en déduit le produit d'inertie \(EI\).
Note
Les conditions aux limites du modèle sont vraiment importantes. Lors de la phase de test, un bloquage cinématique complet des frontières du modèle avait été testé après la mise en place du chargement. L'erreur commise devenait alors assez importante dans le cas où le matériau était proche d'être incompressible : déplacements sous-estimés jusqu'à 25%.
De manière plus générale, des conditions aux limites en contraintes sont plus logiques, puisque les contraintes convergent en \(1/r^2\) alors que les déplacements sont en \(1/r\).
Remarque
Il est important d'initialiser la Phase_0 avec une procédure Field Stress. En effet, si on initialise avec une \(K_0\) procedure, puis que l'on charge, on se retrouve avec une contrainte hors plan issue des lois élastoplastiques. Dans le cadre de l'élasticité, \(\sigma_{zz} = \nu (\sigma_{rr} + \sigma_{\theta\theta}) = 2 \nu \sigma_0\).
On peut alors avoir des plastifications parasites liées à cet état de
contraintes si :
Validation du calculateur pour le matériau de Mohr-Coulomb
Pour cette partie, on choisit de mener une vaste étude paramétrique pour comparer les versions 3 et 4 (la présente version) de Tunren (6912 calculs), puis on piochera au hasard des configurations dans la base pour effectuer des comparaisons avec Plaxis, sur le déplacement à la pose du soutènement et à l'équilibre.
Paramétrage
On se place pour toute cette validation dans le cas d'un tunnel de 5 m de rayon, avec des pas d'avancement de 2 m et une distance minimale du front au soutènement de 20 cm.
On fait varier les différents paramètres :
- \(\sigma_0\) [MPa] \(\in \{0.25,0.5,1,2\}\)
- \(\phi\) [°] \(\in \{0,30,35\}\)
- \(\psi\) [°] \(\in \{0,5^*\}\) (\(^*\) si \(\phi = 35\)°)
- Nombre de stabilité \(N \in \{3,4,5\}\)
- \(\nu \in \{0.25,0.33,0.49 \}\)
- \(E\) \(\in \{10 \times \sigma_0,100 \times \sigma_0,1000 \times \sigma_0,2000 \times \sigma_0 \}\)
- \(K_\text{sn} \in \{0.072 \times E,2.275 \times E,72\times E \}\)
On teste alors différents profils longitudinaux de déplacements, soit les deux LDP proposées par Panet, celle présentée par Corbetta, et celle introduite en 2009 par Vlachopoulos et Diederichs.
Comparaison avec Tunren v3 (précédente version)
La première étape est purement illustrative, et ne sert pas à la validation proprement dite. Elle permet simplement de constater la différence qui existe entre les version 3 et 4 de Tunren. En effet, Tunren v4 prend en compte des déformations élastiques dans la zone plastique pour établir la GRC, ce qui n'était pas le cas auparavant. On obtient alors l'histogramme suivant :

Il apparaît que l'ancien Tunren surestimait systématiquement le déplacement, ce qui va dans le sens de la sécurité pour la prise en compte des déformations, mais pas pour l'évaluation de la contrainte d'équilibre.
Note
Il ne s'agit pas exactement de Tunren v3, mais plutôt les équations de Tunren v3 recodées sous python pour faciliter
les manipulations. Si quelques vérifications concluantes ont été menées pour s'assurer de la concordance entre le vrai Tunren v3 et son jumeau, elles n'ont pas été extensives, puisque cette comparaison n'est présente qu'à titre indicatif.
Déplacement à la pose
L'étude de l'écart-relatif des déplacements à la pose annoncés par Tunren v4 pour un déconfinement donné à la valeur calculée par Plaxis2D est menée sur 72 simulations, piochées aléatoirement dans la base de données précédente.
On obtient ainsi un histogramme présenté ci-dessous, les résultats pour Tunren v3 étant donnés à titre comparatif :

Les calculs de Tunren sont bien en adéquation avec les calculs Plaxis2D menés, avec plus de 90% de calculs dont l'erreur est inférieure à 1% et 100% dont l'erreur est inférieure à 2%.
Déplacement à l'équilibre
On utilise le même jeu de simulations pour mesurer l'erreur à l'équilibre, d'où on obtient :
Encore une fois, l'erreur est en deçà des seuils admissibles.
Exploitation de modèles réels
Afin de vérifier que les résultats obtenus sont représentatifs de ceux que l'on pourrait obtenir en pratique dans le cas où c'est le poids du sol qui charge le terrain, on effectue quelques simulations supplémentaires sur un modèle 2D en déformations planes avec un \(\gamma = 20\) kN/m\(^3\) et une hauteur de couverture variable. On résume dans le tableau ci-dessous les caractéristiques de divers configurations testées.
On présente alors les résultats (exposant \((\cdot)^T\) pour Tunren, \((\cdot)^P\) pour Plaxis).
A noter que le déplacement Plaxis2D n'est pas uniforme le long de la section du tunnel, on a donc fait la moyenne arithmétique du minimum et du maximum. A faible profondeur (tunnel 2034\(^*\) à 50 mètres, soit à peine dix rayons), cela explique les écarts relativement importants observés (plus le fait que dans ce cas précis, le rayon plastique est assez important, de l'ordre de 22 mètres à la pose du soutènement).
On peut alors calculer l'écart-relatif au modèle Plaxis2D à la pose et à l'équilibre pour chacun des cas :
Ces écarts restent largement admissibles. L'écart pour le 2034\(^*\) a été justifié plus haut par la faible profondeur.
Validation du calculateur pour le matériau de Hoek-Brown
Pour le calculateur de Hoek-Brown, on réalise moins de tests, car ils sont un peu plus compliqués à automatiser (beaucoup de paramètres, et un nombre de stabilité proposé par Bernaud et Rousset assez difficile à piloter). Avant de présenter les matériaux testés, quelques remarques :
- L'utilitaire Plaxis propose le calcul des paramètres \(m_b\), \(a\) et \(s\) à partir des données brutes \(m_i\), GSI et \(D\). Cependant, les seules formules analytiques dont nous disposons correspondent à \(a=1/2\) (un schéma de différences finies peut permettre de contourner ce problème), il faut donc calculer manuellement \(m_b\) et \(s\) à partir de leur définition (\(\varphi\) notice technique) et imposer \(a=0.5\) pour obtenir les mêmes résultats que ceux proposés par Tunren.
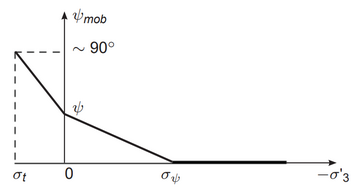
- Les développeurs de Plaxis ont introduit une grandeur \(\sigma_\psi\) qui contrôle la mobilisation de l'angle de dilatance. Le calcul Tunren présuppose que cet angle est entièrement mobilisé dès l'apparition de la plastification. Pour se placer dans ce cadre avec Plaxis, il faut donc choisir un \(\sigma_\psi\) assez élevé. Après quelques calculs, la valeur \(2\sigma_0\) semble convenir.
On présente ci-dessous les matériaux testés.
| N° | \(E\) [MPa] | \(\nu\) | \(\sigma_0\) [MPa] | \(K_\text{sn}\) [MPa] | GSI | \(\sigma_{ci}\) [MPa] | \(m_i\) | \(D\) | \(\psi\) [°] | \(\sigma_\psi\) [MPa] |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1000 | 0.25 | 1 | 1000 | 37 | 100 | 7 | 0 | 0 | / |
| 1 | 1168 | 0.25 | 2 | 36 | 57 | 2.8 | 7 | 0 | 0 | / |
| 2 | 12000 | 0.33 | 3 | 1000 | 30 | 35 | 6 | 0.5 | 0 | / |
| 3 | 63750 | 0.3 | 3 | 1000 | 35 | 75 | 9 | 0.5 | 0 | / |
| 4 | 12000 | 0.33 | 3 | 1000 | 30 | 35 | 6 | 0.5 | 5 | 0 |
| 5 | 12000 | 0.33 | 3 | 1000 | 30 | 35 | 6 | 0.5 | 5 | 3 |
| 6 | 12000 | 0.33 | 3 | 1000 | 30 | 35 | 6 | 0.5 | 5 | 6 |
On teste différents cas pour la limite de mobilisation de l'angle de dilatance, afin d'observer la convergence de la valeur obtenue vers celle calculée par Tunren. Les résultats obtenus sont alors probants :
Si on calcule l'écart-relatif pour chaque simulation :